
www.przemysl-polska.com
11
'22
Written on Modified on
Autonomiczna nawigacja – milimetrowa precyzja
W dobie Internetu rzeczy (IoT) i Przemysłu 4.0 coraz większą rolę odgrywa intralogistyka. Kluczowym czynnikiem dla wydajnej produkcji staje się precyzyjny transport towarów i materiałów. Mobilne systemy transportowe firmy Evocortex wykonują to zadanie w niezwykły sposób. Innym decydującym czynnikiem dla realizacji kreatywnej koncepcji technicznej jest gęstość mocy wykorzystywanych silników FAULHABER.

Obecnie „produkcja” stała się synonimem „złożoności”. Coraz częściej odbywa się ona zgodnie z indywidualnymi wytycznymi klientów. Dzięki integracji z IoT nawet w przypadku pełnej automatyzacji możliwe jest wyprodukowanie serii liczącej tylko jedną sztukę. Tak duża liczba wariantów wymaga ściśle zazębionych, a jednocześnie bardzo elastycznych procesów. Odpowiednie części i komponenty, w niemal nieograniczonej liczbie kombinacji, muszą być gotowe na odpowiednich stanowiskach produkcyjnych we właściwym czasie.
Przewaga AMR
Transport materiałów, np. pomiędzy punktami zaopatrzenia i systemami produkcji, staje się coraz bardziej zindywidualizowany. Jednocześnie konieczna jest jego maksymalna automatyzacja. W tej sytuacji przewagę w magazynach i halach produkcyjnych na całym świecie zyskują mobilne platformy robotów, znane w branży jako autonomiczne roboty mobilne (AMR).
Na tym segmencie rynku skupia się działalność startupu Evocortex z Norymbergi, który powstał w 2016 we współpracy z doświadczonymi ekspertami w dziedzinie robotów. Ściśle powiązana z sąsiadującą szkołą techniczną (Technische Hochschule Nürnberg) i innymi placówkami edukacyjnymi i badawczymi firma weszła na rynek, prezentując całkowicie nową koncepcję AMR. Wraz z produktami firma oferuje kreatywne i innowacyjne rozwiązania spełniające wymagania nowoczesnej logistyki.
„Tradycyjne systemy AMR często wymagają adaptacji przestrzeni pod kątem torów jazdy, a nawet technicznych modyfikacji procesów” – wyjaśnia dyrektor zarządzający Hubert Bauer. „Wymagane są między innymi znaczniki optyczne, które zapewniają właściwą orientację przenośników, a ścieżki i skrzyżowania muszą mieć określone wymiary i promienie łuku. My chcieliśmy stworzyć roboty transportowe, które dostosowują się do potrzeb klienta, nie odwrotnie”.

Precyzyjna identyfikacja pozycji dzięki zapamiętywaniu kształtu podłogi
Autonomiczne roboty mobilne (AMR) firmy Evocortex potrafią określić swoją lokalizację i znaleźć właściwą drogę bez żadnych systemów wspomagających prowadzenie. Swoją orientację określają na podstawie nierówności w podłodze w hali. Takie nierówności występują nawet na standardowych gładkich betonowych podłogach. Są one rejestrowane przez kamerę robota o wysokiej rozdzielczości. Kamera znajduje się pod spodem przenośnika, jest w stanie uchwycić obraz o rozmiarach 10 x 10 cm i wykorzystuje pochodzące z niego dane do utworzenia odpowiednika „odcisku palca” z podłogi w hali. Mózgiem tego innowacyjnego systemu jest opracowany przez nas Moduł lokalizacji (ELM).
W początkowym procesie uczenia robot porusza się po podłodze według wzoru siatki. Za pomocą złożonych algorytmów z wzorca utworzonego przez pojedyncze punkty tworzona jest bardzo dokładna mapa. W przyszłości za proces ten będzie odpowiedzialna samoucząca się sztuczna inteligencja. Dodatkowo sterownik bada ruchy własne przenośnika. Łącząc dane, może – teoretycznie na powierzchni jednego kilometra kwadratowego – pozycjonować z dokładnością do milimetra. W tym celu potrzebuje tylko trzech zidentyfikowanych punktów. System ELM prowadzony jest w stabilny, precyzyjny i dokładny sposób, nawet gdy 50% podłogi pokryte jest trocinami. Do mapy dodawane są nowo powstałe trwałe zarysowania podłogi, a elementy, które znikają, są po pewnym czasie usuwane.
Systemy AMR można opcjonalnie wyposażyć w dodatkowe czujniki LIDAR umieszczone na jednym lub dwóch frontach. Skanują one pomieszczenie w kierunku jazdy i wykrywają przeszkody – w tym te, które się poruszają, np. osoby, które przecinają tor jazdy. Przenośnik zatrzymuje się natychmiast, aby zapewnić bezpieczeństwo pracowników.

Nieograniczona mobilność dzięki kołom Mecanum
Standardowe koło porusza się wyłącznie w tym samym kierunku co jego oś. Aby precyzyjnie ustawić przenośnik z takimi kołami, należy manewrować w taki sam sposób, jak podczas parkowania samochodu. Chcąc tego uniknąć, projektanci z firmy Evocortex zdecydowali się na wykorzystanie kół Mecanum. Koła nie mają zamkniętej powierzchni jezdnej – zamiast tego na ich obwodzie umieszczone są beczkowate rolki. Są zamocowane pod kątem 45 stopni do osi koła i mogą obracać się wokół nachylonej osi własnego łożyska. Kształt, rozmiar i rozstaw rolek dobrane są tak, aby zapewnić kołu ciągłą powierzchnię toczenia.
Podczas toczenia koła Mecanum powstają dwie siły składowe: w kierunku obrotów całego koła oraz pod kątem prostym do tego kierunku. Wynikowy kierunek ruchu wypada pośrodku: koło Mecanum „chce” poruszać się pod kątem 45 stopni do kierunku osiowego. Ze względu na mobilność rolek nie posiada jednak stabilności kierunkowej. Jeśli istnieją dodatkowe siły, kierunek własny ruchu koła może zostać dowolnie zmodyfikowany.
W przenośniku z czterema kołami Mecanum każdy z kątów 45 stopni jest ustawiony z przesunięciem 90 stopni. Każde z kół próbuje więc poruszać się w innym kierunku. Zmieniając kierunek obrotu i prędkość poszczególnych kół, przenośnik można skierować w dowolnym kierunku z położenia spoczynkowego lub obracać nim w miejscu. W płaszczyźnie poziomej może więc poruszać się swobodnie jak poduszkowiec. Koła Mecanum umożliwiają w ten sposób dynamiczny i wielokierunkowy ruch robota.
Skalowalność w milimetrowych odstępach
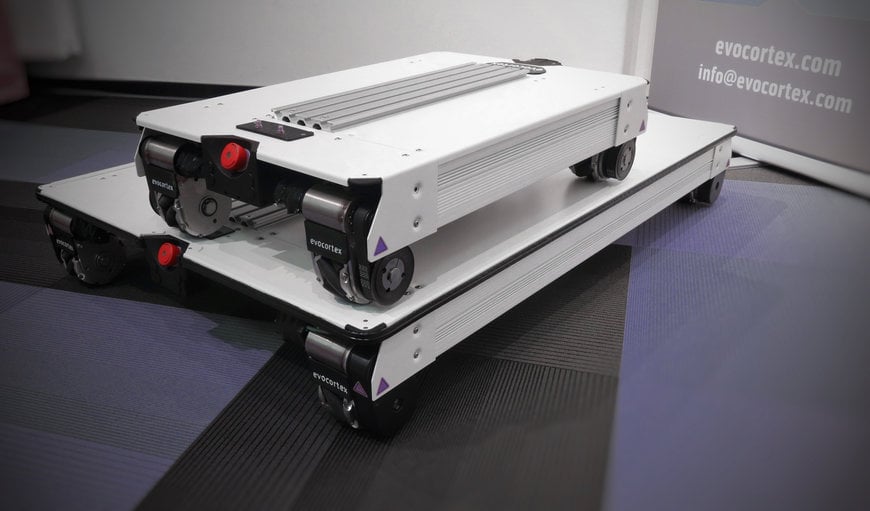
System AMR firmy Evocortex cechuje jeszcze jeden wymiar elastyczności: praktycznie nieograniczony wybór rozmiarów. „W razie potrzeby możemy dostosować robota do wymagań naszych klientów z milimetrową precyzją” – podkreśla Hubert Bauer. „Możemy zrealizować każdy wymiar zewnętrzny w zakresie od 400 na 480 do 800 na 1200 milimetrów”. Produkty linii EvoRobot R&D i EvoRobot Industrial również mniej więcej odpowiadają wymiarom zewnętrznym platformy nośnej. Wszystkie elementy technologiczne – czujnik, sterownik, podnośnik i napędy kół – znajdują się pod platformą.
Kluczowym elementem tej skalowalności jest moduł napędowy kół. Znajduje się on bezpośrednio nad kołem i wraz z nim tworzy standardową, niezależną jednostkę. W rezultacie koła mogą znajdować się w dowolnej odległości od siebie. Decydującym elementem takiego układu jest mocny i bardzo niewielki silnik.
„Bardzo uważnie zbadaliśmy rynek w poszukiwaniu silników spełniających wymagania związane z tym zastosowaniem” – mówi Hubert Bauer, wspominając fazę projektowania. „Wymaganą gęstość mocy zapewniały tylko silniki FAULHABER”. W silnikach konkurencji brakowało miejsca na wymagany moment obrotowy”.

Ogromna moc, minimalny rozmiar
Moduły kół EvoRobot wyposażone są w silniki DC serii 3257… CR lub 3272…CR. Każdy z nich posiada enkoder IEF3 i przekładnię 38/2 S. Aby zagwarantować szybkie zatrzymanie i zablokowanie kół po zatrzymaniu, silniki kół są również wyposażone w hamulce. „Dzięki ogromnej mocy mikrosilników EvoRobot może transportować do 200 kilogramów. Większe ładunki będą możliwe już wkrótce” – wyjaśnia Hubert Bauer. „Transport możliwy jest również na pochyłościach o nachyleniu do pięciu stopni i przy prędkości jednego metra na sekundę”.
Linia produktów EvoCarrier została zaprojektowana pod kątem transportu małych przenośników ładunku. W przypadku wewnętrznych elementów systemów AMR mamy do czynienia z jeszcze większymi ograniczeniami przestrzeni niż w przypadku EvoRobot. Odległość od podłoża nie przekracza 100 mm. Dzięki temu mieści się on w bardzo niewielkich szczelinach pod transportowanymi towarami. Dwa lub cztery urządzenia EvoCarrier mogą także wspólnie transportować palety lub całe jednostki regałów. Jako napędy projektanci wybrali tzw. „płaskie silniki z wirnikami” – bezszczotkowe silniki serii 4221… BXT o długości zaledwie 21 milimetrów. Dzięki temu EvoCarrier może transportować wózki podłogowe załadowane nośnikami małych ładunków (KLT) ważącymi łącznie maksymalnie 120 kg. Dyrektor zarządzający uważa, że w dłuższej perspektywie wraz z EvoRobot nastąpi przejście na silniki bezszczotkowe, a moduły będą poddawane dalszej standaryzacji.
Oprócz stosunku mocy do wielkości, ważną rolę w eksploatacji wózków samojezdnych AMR odgrywa przede wszystkim zerowe zapotrzebowanie na konserwację i niezawodność ciągłej eksploatacji. „Silniki FAULHABER przekraczają nasze wymagania w zakresie okresu eksploatacji” – mówi Hubert Bauer. „Ich kolejnym atutem jest kompatybilność z wszystkimi układami sterowania powszechnie wykorzystywanymi w przemyśle. Eksperci firmy FAULHABER bardzo pomogli nam również w określeniu optymalnych ustawień parametrów produkcji seryjnej”.
